Building a 3D Simulator in Delphi FMX — Controlling a Drone‑Like Object with Viewport3D
This page explains how to build a 3D simulator in Delphi FMX using
TViewport3D, where you control a drone‑like object inside a
three‑dimensional space.
Rather than a game, this is a technical example focused on understanding
coordinate systems and implementing object movement logic.
It is useful for learning FMX’s 3D features, spatial control, and
real‑time object manipulation.
The drone is operated using a joystick (gamepad), which you can connect
to your PC via USB.

- Left Stick
- Up/Down: ascend / descend
Left/Right: rotate left / right - Right Stick
- Move forward, backward, left, and right
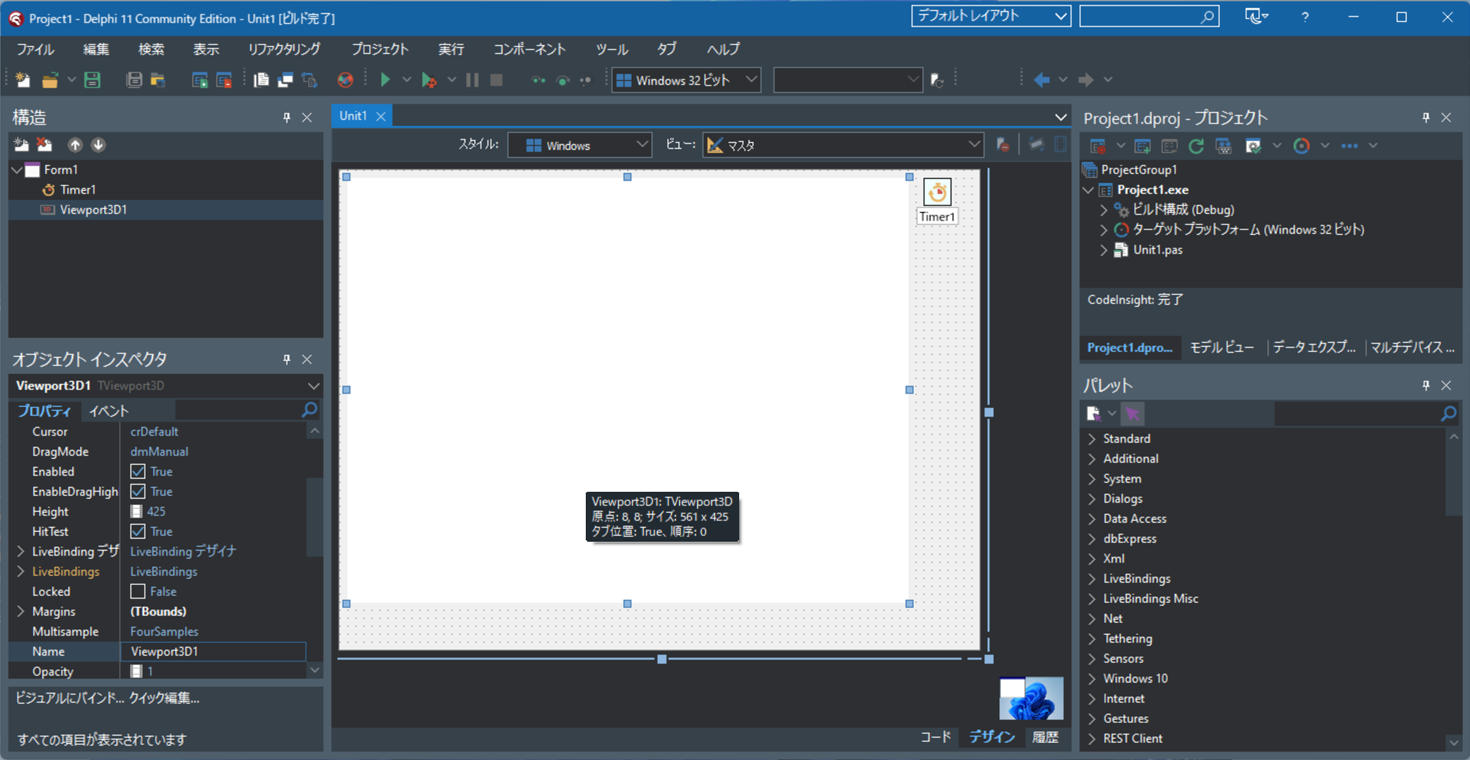
Create a New Delphi FMX Project and Place the Required Components
Start Delphi -> File -> New -> Multi‑Device Application,
then choose "Blank Application" and click OK.
Drag and drop TTimer and TViewport3D onto the form.
Writing the Source Code
Add the following code to the OnCreate event of Form1
and the OnTimer event of Timer1.
unit Unit1; interface uses System.SysUtils, System.Types, System.UITypes, System.Classes, System.Variants, FMX.Types, FMX.Controls, FMX.Forms, FMX.Graphics, FMX.Dialogs, FMX.Viewport3D, FMX.MaterialSources, FMX.Controls.Presentation, FMX.Edit, System.Math.Vectors, FMX.Controls3D, FMX.Objects3D, FMX.Types3D; type // Drone position and velocity parameters TDronePos=record x,y,z:Single; vx,vy,vz:Single; turn:Single; end; TForm1 = class(TForm) Viewport3D1: TViewport3D; Timer1: TTimer; procedure Timer1Timer(Sender: TObject); procedure FormCreate(Sender: TObject); private { private declarations } grid:TGrid3D; cam:TCamera; mat0,mat1,mat2,mat3,mat4:TLightMaterialSource; light:TLight; drone:TDummy; r1,r2,r3,r4:TDummy; shadow:TDisk; pos:TDronePos; public { public declarations } end; var Form1: TForm1; const DF=32767; implementation uses Winapi.MMSystem, DirectInput; {$R *.fmx} procedure TForm1.FormCreate(Sender: TObject); var mesh:TCustomMesh; begin //Axis directions: X → right, Y → down, Z → forward Timer1.Interval:=33; pos.x:=0; pos.y:=0; pos.z:=0; pos.vx:=0; pos.vy:=0; pos.vz:=0; pos.turn:=0; //Axis directions: X → right, Y → down, Z → forward mat0:=TLightMaterialSource.Create(self); mat1:=TLightMaterialSource.Create(self); mat1.Diffuse:=$FF000000; mat2:=TLightMaterialSource.Create(self); mat2.Diffuse:=$FFFF0000; mat3:=TLightMaterialSource.Create(self); mat3.Diffuse:=$FF0000FF; mat4:=TLightMaterialSource.Create(self); mat4.Diffuse:=$FF888888; //Camera setup cam:=TCamera.Create(self); cam.Parent:=Viewport3D1; cam.Position.SetPoint3DNoChange(Point3D(0,-50,-50)); cam.RotationAngle.X:=-45; Viewport3D1.Camera:=cam; Viewport3D1.UsingDesignCamera:=False; //Point light setup light:=TLight.Create(self); light.Parent:=Viewport3D1; light.LightType:=TLightType.Point; light.Position.X:=50; light.Position.Y:=-2000; light.Position.Z:=-100; light.Color:=TAlphaColorRec.White; light.Color:=$FFDDDDDD; light.Visible:=true; light.Enabled:=True; //Grid setup grid:=TGrid3D.Create(self); grid.Parent:=Viewport3D1; grid.Width:=1000; grid.Height:=1000; grid.RotationAngle.X:=90; grid.Position.Y:=1; grid.LineColor:=$FF999999; //rone body drone:=TDummy.Create(self); drone.Parent:=Viewport3D1; mesh:=TCylinder.Create(self); TCylinder(mesh).Height:=4; TCylinder(mesh).Width:=10; TCylinder(mesh).Depth:=10; TCylinder(mesh).Position.Y:=-4; TCylinder(mesh).MaterialSource:=mat0; mesh.Parent:=drone; //Arms connecting to rotors mesh:=TCube.Create(self); TCube(mesh).Height:=1; TCube(mesh).Width:=20; TCube(mesh).Depth:=1; TCube(mesh).MaterialSource:=mat0; TCube(mesh).Position.Y:=-5.5; TCube(mesh).RotationAngle.Y:=45; mesh.Parent:=drone; mesh:=TCube.Create(self); TCube(mesh).Height:=1; TCube(mesh).Width:=20; TCube(mesh).Depth:=1; TCube(mesh).MaterialSource:=mat0; TCube(mesh).Position.Y:=-5.5; TCube(mesh).RotationAngle.Y:=-45; mesh.Parent:=drone; //Red cube indicating the rear of the drone mesh:=TCube.Create(self); mesh.Parent:=drone; TCube(mesh).Height:=1; TCube(mesh).Width:=1; TCube(mesh).Depth:=1; TCube(mesh).MaterialSource:=mat2; TCube(mesh).Position.Y:=-5.0; TCUbe(mesh).Position.Z:=-5; //Blue cube indicating the front of the drone mesh:=TCube.Create(self); mesh.Parent:=drone; TCube(mesh).Height:=1; TCube(mesh).Width:=1; TCube(mesh).Depth:=1; TCube(mesh).MaterialSource:=mat3; TCube(mesh).Position.Y:=-5.0; TCUbe(mesh).Position.Z:=5; //Rear-left rotor r1:=TDummy.Create(self); r1.Parent:=drone; r1.Position.X:=-7; r1.Position.Y:=-6; r1.Position.Z:=7; mesh:=TCube.Create(self); TCube(mesh).Height:=0.6; TCube(mesh).Width:=12; TCube(mesh).Depth:=0.6; TCube(mesh).RotationAngle.Y:=0; TCube(mesh).MaterialSource:=mat0; TCube(mesh).Parent:=r1; mesh:=TCube.Create(self); TCube(mesh).Height:=0.6; TCube(mesh).Width:=12; TCube(mesh).Depth:=0.6; TCube(mesh).RotationAngle.Y:=90; TCube(mesh).MaterialSource:=mat0; TCube(mesh).Parent:=r1; //Rear-left rotor r2:=TDummy.Create(self); r2.Parent:=drone; r2.Position.X:=7; r2.Position.Y:=-6; r2.Position.Z:=7; mesh:=TCube.Create(self); TCube(mesh).Height:=0.6; TCube(mesh).Width:=12; TCube(mesh).Depth:=0.6; TCube(mesh).RotationAngle.Y:=0; TCube(mesh).MaterialSource:=mat0; TCube(mesh).Parent:=r2; mesh:=TCube.Create(self); TCube(mesh).Height:=0.6; TCube(mesh).Width:=12; TCube(mesh).Depth:=0.6; TCube(mesh).RotationAngle.Y:=90; TCube(mesh).MaterialSource:=mat0; TCube(mesh).Parent:=r2; //Front-left rotor r3:=TDummy.Create(self); r3.Parent:=drone; r3.Position.X:=-7; r3.Position.Y:=-6; r3.Position.Z:=-7; mesh:=TCube.Create(self); TCube(mesh).Height:=0.6; TCube(mesh).Width:=12; TCube(mesh).Depth:=0.6; TCube(mesh).RotationAngle.Y:=0; TCube(mesh).MaterialSource:=mat1; TCube(mesh).Parent:=r3; mesh:=TCube.Create(self); TCube(mesh).Height:=0.6; TCube(mesh).Width:=12; TCube(mesh).Depth:=0.6; TCube(mesh).RotationAngle.Y:=90; TCube(mesh).MaterialSource:=mat1; TCube(mesh).Parent:=r3; //Front-right rotor r4:=TDummy.Create(self); r4.Parent:=drone; r4.Position.X:=7; r4.Position.Y:=-6; r4.Position.Z:=-7; mesh:=TCube.Create(self); TCube(mesh).Height:=0.6; TCube(mesh).Width:=12; TCube(mesh).Depth:=0.6; TCube(mesh).RotationAngle.Y:=0; TCube(mesh).MaterialSource:=mat1; TCube(mesh).Parent:=r4; mesh:=TCube.Create(self); TCube(mesh).Height:=0.6; TCube(mesh).Width:=12; TCube(mesh).Depth:=0.6; TCube(mesh).RotationAngle.Y:=90; TCube(mesh).MaterialSource:=mat1; TCube(mesh).Parent:=r4; //Set camera target to the drone cam.Target:=drone; //Shadow disk under the drone shadow:=TDisk.Create(self); shadow.Width:=10; shadow.Depth:=10; shadow.MaterialSource:=mat4; shadow.Parent:=Viewport3D1; end; procedure TForm1.Timer1Timer(Sender: TObject); var ji:TJoyInfoEx; begin // Apply damping to velocity pos.vx:=pos.vx*0.95; pos.vy:=pos.vy*0.90; pos.vz:=pos.vz*0.95; // Rotate rotors r1.RotationAngle.Y:=r1.RotationAngle.Y+30; r2.RotationAngle.Y:=r2.RotationAngle.Y+30; r3.RotationAngle.Y:=r3.RotationAngle.Y+30; r4.RotationAngle.Y:=r4.RotationAngle.Y+30; ji.dwSize:=SizeOf(ji); ji.dwFlags:= JOY_RETURNALL; if (joyGetPosEx(JOYSTICKID1,@ji)=JOYERR_NOERROR) then begin pos.turn:=pos.turn+ (Integer(ji.wXpos)-DF)/DF*5; pos.vy:=pos.vy+ (Integer(ji.wYpos)-DF)/DF/10; pos.vx:=pos.vx+ (Integer(ji.wZpos)-DF)/DF/10; pos.vz:=pos.vz+ (Integer(ji.dwRpos)-DF)/DF/10; pos.y:=pos.y+pos.vy; if (pos.y>0) then begin pos.y:=pos.y-pos.vy; pos.vy:=-pos.vy*0.8; end; pos.x := pos.x+ cos((-pos.turn-90)/180*Pi)*pos.vz; pos.z := Pos.z+ sin((-pos.turn-90)/180*Pi)*pos.vz; pos.x := pos.x+ cos((-pos.turn)/180*Pi)*pos.vx; pos.z := pos.z+ sin((-pos.turn)/180*Pi)*pos.vx; drone.Position.X:=pos.x; drone.Position.Z:=pos.z; drone.Position.Y:=pos.y; shadow.Position.X:=pos.x; shadow.Position.Z:=pos.z; drone.ResetRotationAngle; drone.RotationAngle.Y:=pos.turn; drone.RotationAngle.X:=pos.vz*10; drone.RotationAngle.Z:=pos.vx*10; end else begin joyConfigChanged(0); end; end; end.
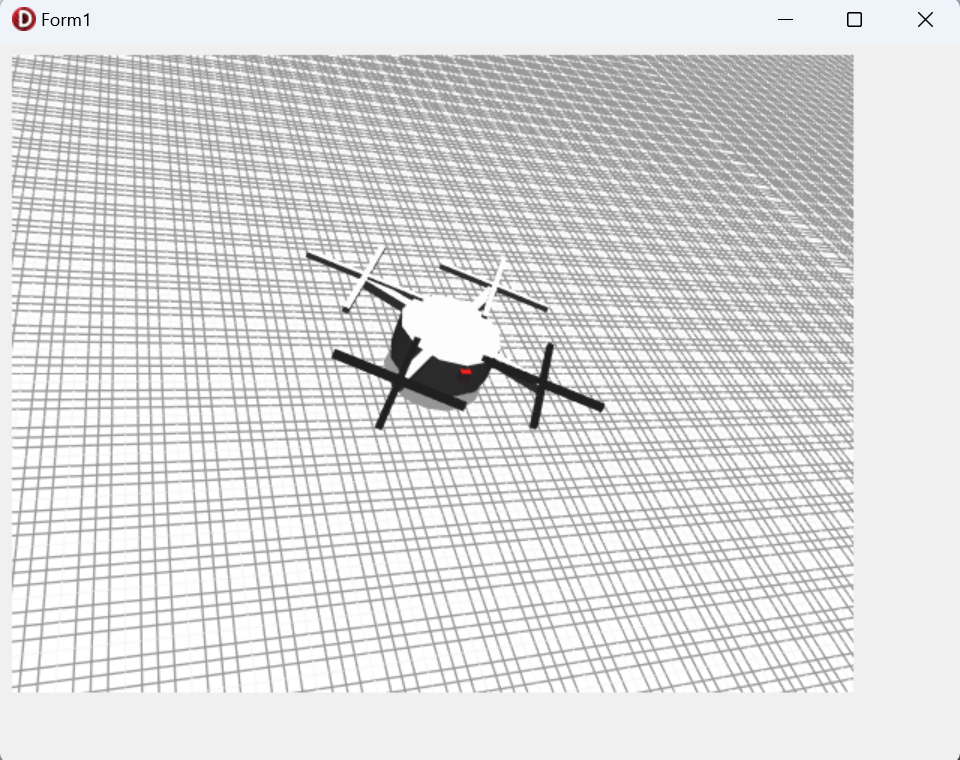
Running the Application
Click the Run button to start the application (running in Debug mode is also fine).
Connect a joystick (gamepad) to your PC via USB and use it to control the drone.