Delphi FMXで3Dシミュレーターを作る|Viewport3Dでドローン風オブジェクトを制御
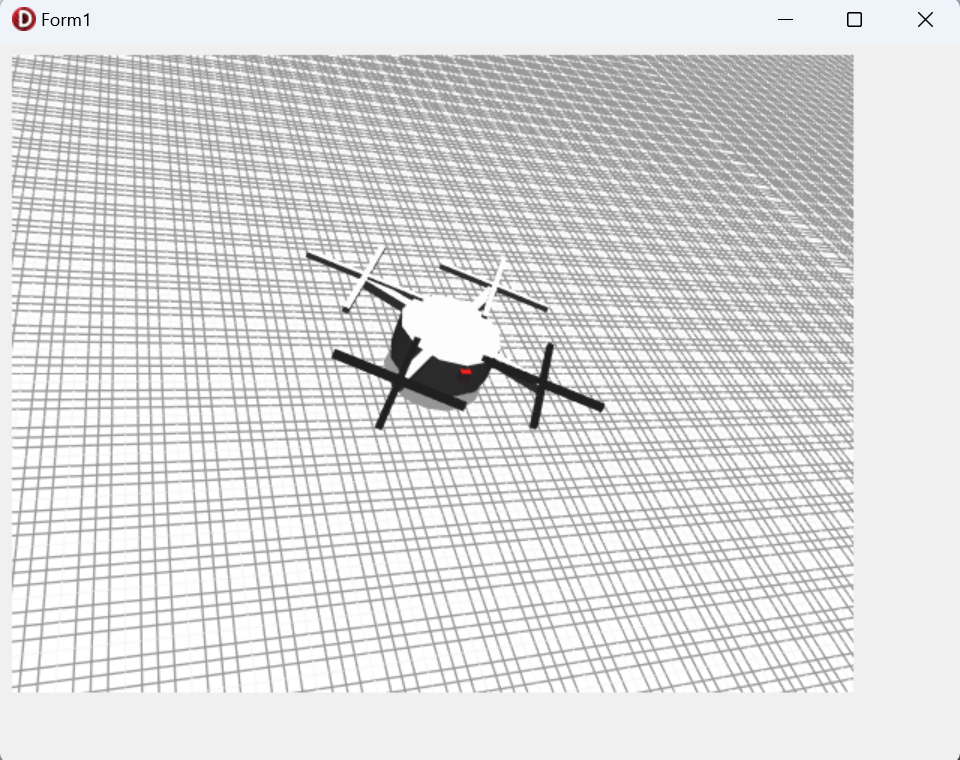
このページでは、Delphi FMXのViewport3Dを使って、3D空間内でドローン風オブジェクトを制御するシミュレーターの構築方法を紹介します。
ゲームではなく、座標系の理解やオブジェクトの移動処理に焦点を当てた技術的な実装例です。
FMXの3D機能を活用したアプリケーション開発や、空間制御の学習に役立つ内容となっています。
ドローンの操縦はジョイスティック(ゲームパッド)で行いますので、パソコンのUSBに接続して使用します。

- 左スティック
- 上下で上昇と下降、左右は左右回転
- 右スティック
- 前後左右に平行移動
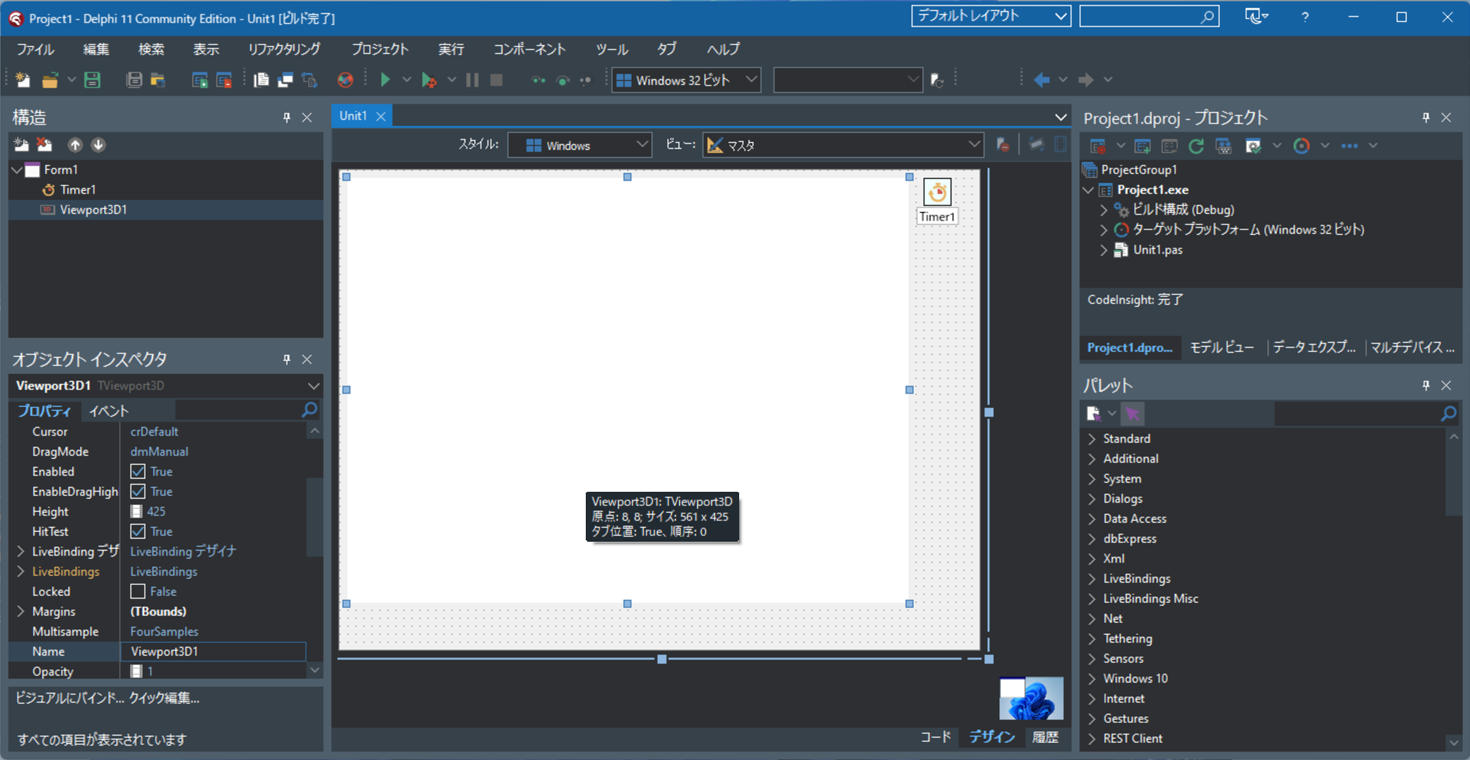
Delphiを起動して新規作成を行い、必要なコンポーネントをドラッグ&ドロップする
Delphi起動⇒ファイル⇒新規作成⇒マルチデバイスアプリケーションを選択し、「空のアプリケーション」を選択してOKボタンをクリックします。
TTimer、TViewPort3Dをフォームへドラッグ&ドロップします。
ソースコードを記述する
Form1のイベントonCreateイベントとTimer1のonTimerイベントに以下のソースコードを記述します。
unit Unit1; interface uses System.SysUtils, System.Types, System.UITypes, System.Classes, System.Variants, FMX.Types, FMX.Controls, FMX.Forms, FMX.Graphics, FMX.Dialogs, FMX.Viewport3D, FMX.MaterialSources, FMX.Controls.Presentation, FMX.Edit, System.Math.Vectors, FMX.Controls3D, FMX.Objects3D, FMX.Types3D; type TDronePos=record x,y,z:Single; vx,vy,vz:Single; turn:Single; end; TForm1 = class(TForm) Viewport3D1: TViewport3D; Timer1: TTimer; procedure Timer1Timer(Sender: TObject); procedure FormCreate(Sender: TObject); private { private 宣言 } grid:TGrid3D; cam:TCamera; mat0,mat1,mat2,mat3,mat4:TLightMaterialSource; light:TLight; drone:TDummy; r1,r2,r3,r4:TDummy; shadow:TDisk; pos:TDronePos; public { public 宣言 } end; var Form1: TForm1; const DF=32767; implementation uses Winapi.MMSystem, DirectInput; {$R *.fmx} procedure TForm1.FormCreate(Sender: TObject); var mesh:TCustomMesh; begin //軸方向 X:→、Y:↓、Z:奥方向 Timer1.Interval:=33; pos.x:=0; pos.y:=0; pos.z:=0; pos.vx:=0; pos.vy:=0; pos.vz:=0; pos.turn:=0; //材質(マテリアル)設定 mat0:=TLightMaterialSource.Create(self); mat1:=TLightMaterialSource.Create(self); mat1.Diffuse:=$FF000000; mat2:=TLightMaterialSource.Create(self); mat2.Diffuse:=$FFFF0000; mat3:=TLightMaterialSource.Create(self); mat3.Diffuse:=$FF0000FF; mat4:=TLightMaterialSource.Create(self); mat4.Diffuse:=$FF888888; //カメラの設置 cam:=TCamera.Create(self); cam.Parent:=Viewport3D1; cam.Position.SetPoint3DNoChange(Point3D(0,-50,-50)); cam.RotationAngle.X:=-45; Viewport3D1.Camera:=cam; Viewport3D1.UsingDesignCamera:=False; //点光源の設置 light:=TLight.Create(self); light.Parent:=Viewport3D1; light.LightType:=TLightType.Point; light.Position.X:=50; light.Position.Y:=-2000; light.Position.Z:=-100; light.Color:=TAlphaColorRec.White; light.Color:=$FFDDDDDD; light.Visible:=true; light.Enabled:=True; //グリッドの設置 grid:=TGrid3D.Create(self); grid.Parent:=Viewport3D1; grid.Width:=1000; grid.Height:=1000; grid.RotationAngle.X:=90; grid.Position.Y:=1; grid.LineColor:=$FF999999; //ドローン本体 drone:=TDummy.Create(self); drone.Parent:=Viewport3D1; mesh:=TCylinder.Create(self); TCylinder(mesh).Height:=4; TCylinder(mesh).Width:=10; TCylinder(mesh).Depth:=10; TCylinder(mesh).Position.Y:=-4; TCylinder(mesh).MaterialSource:=mat0; mesh.Parent:=drone; //ドローンのローターへの棒 mesh:=TCube.Create(self); TCube(mesh).Height:=1; TCube(mesh).Width:=20; TCube(mesh).Depth:=1; TCube(mesh).MaterialSource:=mat0; TCube(mesh).Position.Y:=-5.5; TCube(mesh).RotationAngle.Y:=45; mesh.Parent:=drone; mesh:=TCube.Create(self); TCube(mesh).Height:=1; TCube(mesh).Width:=20; TCube(mesh).Depth:=1; TCube(mesh).MaterialSource:=mat0; TCube(mesh).Position.Y:=-5.5; TCube(mesh).RotationAngle.Y:=-45; mesh.Parent:=drone; //ドローンの後ろ側を示す赤いキューブ mesh:=TCube.Create(self); mesh.Parent:=drone; TCube(mesh).Height:=1; TCube(mesh).Width:=1; TCube(mesh).Depth:=1; TCube(mesh).MaterialSource:=mat2; TCube(mesh).Position.Y:=-5.0; TCUbe(mesh).Position.Z:=-5; //ドローンの前側を示す青いキューブ mesh:=TCube.Create(self); mesh.Parent:=drone; TCube(mesh).Height:=1; TCube(mesh).Width:=1; TCube(mesh).Depth:=1; TCube(mesh).MaterialSource:=mat3; TCube(mesh).Position.Y:=-5.0; TCUbe(mesh).Position.Z:=5; //ドローンの左奥ローター r1:=TDummy.Create(self); r1.Parent:=drone; r1.Position.X:=-7; r1.Position.Y:=-6; r1.Position.Z:=7; mesh:=TCube.Create(self); TCube(mesh).Height:=0.6; TCube(mesh).Width:=12; TCube(mesh).Depth:=0.6; TCube(mesh).RotationAngle.Y:=0; TCube(mesh).MaterialSource:=mat0; TCube(mesh).Parent:=r1; mesh:=TCube.Create(self); TCube(mesh).Height:=0.6; TCube(mesh).Width:=12; TCube(mesh).Depth:=0.6; TCube(mesh).RotationAngle.Y:=90; TCube(mesh).MaterialSource:=mat0; TCube(mesh).Parent:=r1; //ドローンの右奥ローター r2:=TDummy.Create(self); r2.Parent:=drone; r2.Position.X:=7; r2.Position.Y:=-6; r2.Position.Z:=7; mesh:=TCube.Create(self); TCube(mesh).Height:=0.6; TCube(mesh).Width:=12; TCube(mesh).Depth:=0.6; TCube(mesh).RotationAngle.Y:=0; TCube(mesh).MaterialSource:=mat0; TCube(mesh).Parent:=r2; mesh:=TCube.Create(self); TCube(mesh).Height:=0.6; TCube(mesh).Width:=12; TCube(mesh).Depth:=0.6; TCube(mesh).RotationAngle.Y:=90; TCube(mesh).MaterialSource:=mat0; TCube(mesh).Parent:=r2; //ドローンの左手前ローター r3:=TDummy.Create(self); r3.Parent:=drone; r3.Position.X:=-7; r3.Position.Y:=-6; r3.Position.Z:=-7; mesh:=TCube.Create(self); TCube(mesh).Height:=0.6; TCube(mesh).Width:=12; TCube(mesh).Depth:=0.6; TCube(mesh).RotationAngle.Y:=0; TCube(mesh).MaterialSource:=mat1; TCube(mesh).Parent:=r3; mesh:=TCube.Create(self); TCube(mesh).Height:=0.6; TCube(mesh).Width:=12; TCube(mesh).Depth:=0.6; TCube(mesh).RotationAngle.Y:=90; TCube(mesh).MaterialSource:=mat1; TCube(mesh).Parent:=r3; //ドローンの右手前ローター r4:=TDummy.Create(self); r4.Parent:=drone; r4.Position.X:=7; r4.Position.Y:=-6; r4.Position.Z:=-7; mesh:=TCube.Create(self); TCube(mesh).Height:=0.6; TCube(mesh).Width:=12; TCube(mesh).Depth:=0.6; TCube(mesh).RotationAngle.Y:=0; TCube(mesh).MaterialSource:=mat1; TCube(mesh).Parent:=r4; mesh:=TCube.Create(self); TCube(mesh).Height:=0.6; TCube(mesh).Width:=12; TCube(mesh).Depth:=0.6; TCube(mesh).RotationAngle.Y:=90; TCube(mesh).MaterialSource:=mat1; TCube(mesh).Parent:=r4; //カメラのターゲットをドローン本体に設定 cam.Target:=drone; //ドローンの影用の円の設置 shadow:=TDisk.Create(self); shadow.Width:=10; shadow.Depth:=10; shadow.MaterialSource:=mat4; shadow.Parent:=Viewport3D1; end; procedure TForm1.Timer1Timer(Sender: TObject); var ji:TJoyInfoEx; begin pos.vx:=pos.vx*0.95; pos.vy:=pos.vy*0.90; pos.vz:=pos.vz*0.95; r1.RotationAngle.Y:=r1.RotationAngle.Y+30; r2.RotationAngle.Y:=r2.RotationAngle.Y+30; r3.RotationAngle.Y:=r3.RotationAngle.Y+30; r4.RotationAngle.Y:=r4.RotationAngle.Y+30; ji.dwSize:=SizeOf(ji); ji.dwFlags:= JOY_RETURNALL; if (joyGetPosEx(JOYSTICKID1,@ji)=JOYERR_NOERROR) then begin pos.turn:=pos.turn+ (Integer(ji.wXpos)-DF)/DF*5; pos.vy:=pos.vy+ (Integer(ji.wYpos)-DF)/DF/10; pos.vx:=pos.vx+ (Integer(ji.wZpos)-DF)/DF/10; pos.vz:=pos.vz+ (Integer(ji.dwRpos)-DF)/DF/10; pos.y:=pos.y+pos.vy; if (pos.y>0) then begin pos.y:=pos.y-pos.vy; pos.vy:=-pos.vy*0.8; end; pos.x := pos.x+ cos((-pos.turn-90)/180*Pi)*pos.vz; pos.z := Pos.z+ sin((-pos.turn-90)/180*Pi)*pos.vz; pos.x := pos.x+ cos((-pos.turn)/180*Pi)*pos.vx; pos.z := pos.z+ sin((-pos.turn)/180*Pi)*pos.vx; drone.Position.X:=pos.x; drone.Position.Z:=pos.z; drone.Position.Y:=pos.y; shadow.Position.X:=pos.x; shadow.Position.Z:=pos.z; drone.ResetRotationAngle; drone.RotationAngle.Y:=pos.turn; drone.RotationAngle.X:=pos.vz*10; drone.RotationAngle.Z:=pos.vx*10; end else begin joyConfigChanged(0); end; end; end.
実行する
実行ボタンを押して実行します。(デバッグ実行でもOKです。)
ジョイスティック(ゲームパッド)をパソコンのUSBに接続して操縦します。